
Uudet keinolihakset: kevyempiä, turvallisempia ja kestävämpiä robotteja
Zürichin ammattikorkeakoulussa tehdyistä tutkimuksista saatu tekniikka lihasryhmille, jotka ovat samankaltaisempia kuin ihmisen ja jotka ovat herkkiä vuorovaikutuksessa ympäristön kanssa
ETH Zürichin tutkijat ovat äskettäin kehittäneet keinotekoisia lihaksia robottiliikettä varten, mutta heidän ratkaisunsa tarjoaa useita etuja aiemmin nähtyihin teknologioihin verrattuna.
Lisätutkimuksen arvoinen, sitä voidaan käyttää kaikissa tapauksissa, joissa robottien on oltava pehmeitä eikä jäykkiä tai niiden on oltava herkempiä vuorovaikutuksessa ympäristön kanssa.
Monet robotikot haaveilevat robottien rakentamisesta, jotka eivät ole vain metallien tai muiden kovien materiaalien ja moottoreiden yhdistelmä, vaan myös pehmeämpiä ja mukautuvampia.
"Pehmeät" automaatit voivat olla vuorovaikutuksessa ympäristön kanssa täysin eri tavalla; ne voivat esimerkiksi vaimentaa iskuja, kuten ihmisen raajat tekevät, tai tarttua esineeseen hellävaraisesti.
Tämä tarjoaisi etuja myös energiankulutuksen kannalta: nykyään robottien liikkuminen vaatii yleensä paljon energiaa pysyäkseen asennossa pitkään, kun taas pehmeät järjestelmät pystyisivät varastoimaan sen paremmin.
Joten mikä voisi olla selvempää kuin ottaa malliksi ihmisen lihasta ja yrittää luoda se uudelleen?
Hyvästi, NCCR Robotics: Kaksitoista täyttä vuotta Sveitsin palveluksessa
On drone, joka "kiipeää" puihin suojellakseen niitä

Jokainen luonnollinen lihas supistuu myös vastauksena riittävään sähköimpulssiin
Keinotekoisten lihasten toiminta perustuu välttämättä biologiaan.
Kuten luonnolliset vastineensa, keinotekoiset lihakset supistuvat vasteena sähköimpulssille.
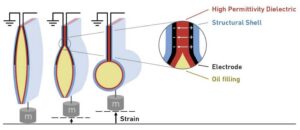
Keinotekoiset lihakset eivät kuitenkaan koostu soluista ja kuiduista, vaan nesteellä (yleensä öljyllä) täytetystä pussista, jonka kotelo on osittain peitetty elektrodeilla.
Kun nämä elektrodit saavat sähköjännitteen, ne tulevat yhteen ja työntävät nesteen muuhun pussiin, joka taipuu ja pystyy siten nostamaan painoa.
Yksi pussi on analoginen lyhyen lihassäikimpun kanssa.
Useita näistä pusseista voidaan liittää yhteen muodostamaan täydellinen propulsioelementti, jota kutsutaan myös toimielimeksi tai yksinkertaisemmin keinotekoiseksi lihakseksi.
Palkinto ProteusDronelle, pehmeälle robotille, jolla on mutanttimuotoja
Robottikoira: eläinbiologian inspiroima sveitsiläinen keksintö
(Kuva: Gravert et al/Science/ETH Zurich)
Alunperin sähköstaattiset toimilaitteet vaativat 6.000 10.000 - XNUMX XNUMX voltin jännitteen
Ajatus tekolihasten kehittämisestä ei ole uusi, mutta tähän asti niiden toteuttamiselle on ollut suuri este: sähköstaattiset toimilaitteet toimivat vain erittäin korkeilla jännitteillä, noin 6.000 10.000 - XNUMX XNUMX voltilla.
Tällä vaatimuksella oli useita seurauksia: esimerkiksi lihakset piti kytkeä suuriin, raskaisiin jännitevahvistimiin, ne eivät toimineet vedessä eivätkä olleet täysin turvallisia ihmisille.
Nyt on kehitetty uusi ratkaisu Robert Katzschmann, robotiikan professori ETH Zürichissä yhdessä Stephan-Daniel Gravertin, Elia Varinin ja muiden kollegoiden kanssa.
He julkaisivat artikkelin keinotekoisen lihaksen versiostaan, joka tarjoaa useita etuja, artikkelissa "Science Advances" -tietosivustolla.
Stephan-Daniel Gravert, joka työskentelee tieteellisenä assistenttina Robert Katzschmannin laboratoriossa, suunnitteli pussiin uudenlaisen kuoren.
Uusi englantilais-sveitsiläinen palonsammutusdroni auttamaan palomiehiä
Siten Sveitsissä robotit "oppivat" vaelluksen salaisuudet

(Kuva: Gravert ja muut, Tiede, 2024)
Ratkaisu tulevaisuutta varten? Nykyään se tulee korkean läpäisevyyden ferrosähköisestä materiaalista
Tutkijat kutsuvat uusia keinotekoisia lihaksia HALVE-toimilaitteiksi, jossa HALVE tarkoittaa "Hydraulisesti vahvistettua matalajännitteistä sähköstaattista".
”Muissa toimilaitteissa elektrodit sijaitsevat vaipan ulkopuolella. Meillä kuori koostuu useista kerroksista. Otimme ferrosähköisen materiaalin, jolla on korkea läpäisevyys eli joka pystyy varastoimaan suhteellisen suuria määriä sähköenergiaa, ja yhdistämme sen elektrodikerrokseen. Sitten pinnoitimme kaiken polymeerikuorella, jolla on erinomaiset mekaaniset ominaisuudet ja joka tekee pussista vakaamman.”hän selittää.
Tällä tavoin tutkijat pystyivät pienentämään tarvittavaa jännitettä, koska ferrosähköisen materiaalin paljon suurempi permittiivisyys mahdollistaa suurien voimien saavuttamisen pienestä jännitteestä huolimatta.
Stephan-Daniel Gravert ja Elia Varini eivät ainoastaan kehittäneet yhdessä HALVE-toimilaitteiden kuorta, vaan myös rakensivat toimilaitteet itse laboratoriossa käytettäväksi kahdessa tietyssä robotissa.
Tel Avivissa Enelin laboratorio tekoälyn ja robotiikan käytöstä energiassa
Näin Atlas-robotti voi jo työskennellä ja olla vuorovaikutuksessa kanssamme
(Kuva: Videokuvakaappaus, Gravert et al, Science, 2024)
Tekniset "pihdit" ja "kalat" osoittavat, mihin Sveitsissä suunniteltu lihas pystyy
Yksi tällainen esimerkki robotista on tarttuja, joka on 11 senttimetriä korkea ja jossa on kaksi sormea.
Jokaista sormea liikuttaa kolme HALVE-toimilaitteen sarjaan kytkettyä taskua.
Pieni akkuvirtalähde syöttää robottia 900 voltilla.
Akku ja virtalähde painavat yhdessä vain 15 grammaa.
Koko jarrusatula, teho- ja ohjauselektroniikka mukaan lukien, painaa 45.
Tarrain voi tarttua sileään muoviesineeseen riittävällä voimalla kantaakseen oman painonsa, kun esine nostetaan ilmaan köydellä.
”Tämä esimerkki osoittaa erinomaisesti kuinka pieniä, kevyitä ja tehokkaita HALVE-toimilaitteet ovat. Se tarkoittaa myös, että olemme ottaneet valtavan askeleen kohti tavoitettamme luoda integroituja lihasohjattuja järjestelmiä.", Katzschmann sanoo tyytyväisenä.
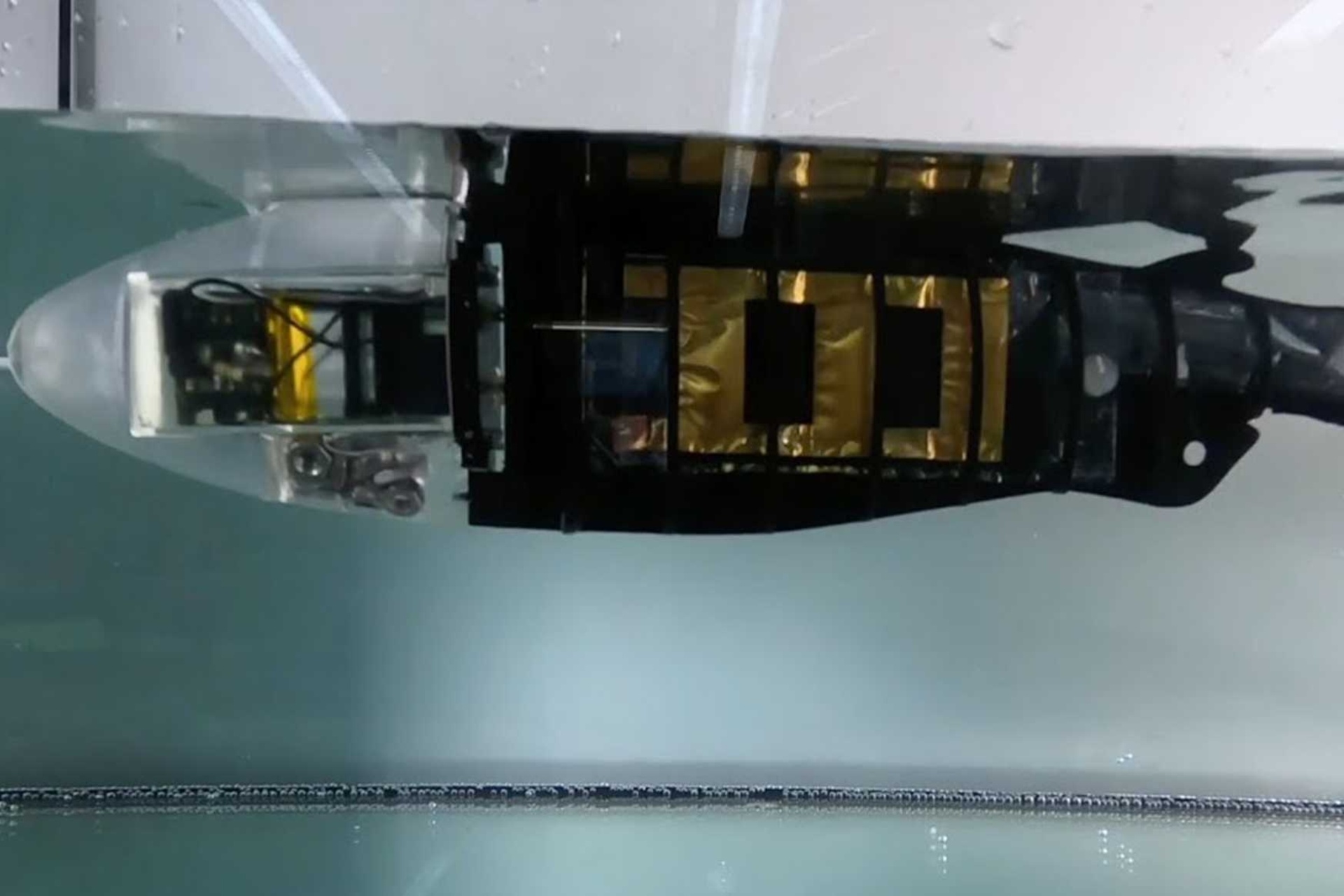
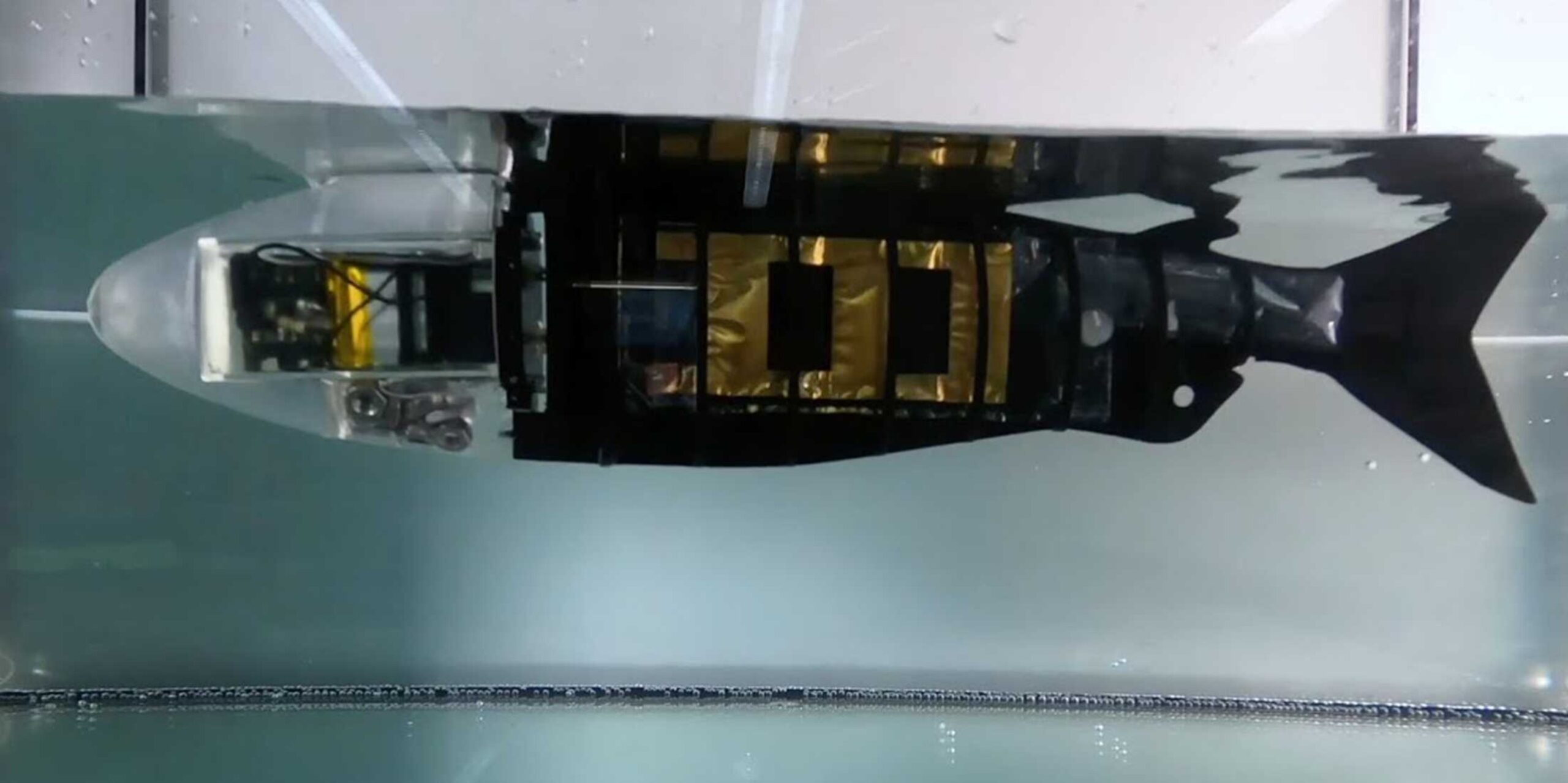
Toinen esine on lähes 30 senttimetriä pitkä kalamainen uimari, joka liikkuu helposti vedessä.
Se koostuu "päästä", joka sisältää elektroniikan, ja joustavasta "rungosta", johon on kiinnitetty "Hydraulisesti vahvistetut pienjännitesähköstaattiset" toimilaitteet.
Nämä toimilaitteet liikkuvat vuorotellen rytmissä, joka tuottaa tyypillisen uintiliikkeen.
Autonominen kala voi poistua pysähtyneisyydestä nopeudella kolme senttimetriä sekunnissa 14 sekunnissa, ja kaikki tämä upotettuna tavalliseen vesijohtoveteen.
Robottikoira: eläinbiologian inspiroima sveitsiläinen keksintö
Sveitsissä Federal Polytechnics läpinäkyvän ja luotettavan tekoälyn takaamiseksi

Uudet toimilaitteet ovat paljon kestävämpiä kuin muut keinolihakset sekä vedenpitävät
Tämä toinen esimerkki on tärkeä, koska se osoittaa HALVE-toimilaitteiden toisen uuden ominaisuuden.
Koska elektrodit eivät ole enää suojattuja kuoren ulkopuolella, keinotekoiset lihakset ovat nyt vedenpitäviä ja niitä voidaan käyttää jopa johtaviin nesteisiin upotettuna.
”Kala havainnollistaa näiden toimilaitteiden yleistä etua: elektrodit on suojattu ulkoiselta ympäristöltä ja päinvastoin elektrodit suojaavat ympäristöä. Voit siis käyttää näitä sähköstaattisia toimilaitteita vedessä tai koskettaa niitä esim., lisää Zürichin Federal Institute of Technologyn professori.
Kirjekuorien kerroksellisella rakenteella on myös toinen etu: uudet toimilaitteet ovat paljon kestävämpiä kuin muut keinolihakset.
Ihannetapauksessa kirjekuorten pitäisi pystyä liikkumaan paljon ja nopeasti.
Pieninkin valmistusvirhe, kuten pölyhiukkanen elektrodien välissä, voi kuitenkin johtaa sähkövikaan, eräänlaiseen "mini salamaniskuun".
4. marraskuuta Lausannessa "Sveitsin robotiikkapäivä"
DroneHub on ennennäkemätön… ”lintutarha” drone-tutkimukseen

”Mini-salaman” ongelmat ratkaistu, yritykset valmiina suurtuotantoon
"Kun tämä tapahtui aiemmissa malleissa, elektrodi paloi ja loi kuoreen reiän. Tämä päästi nesteen ulos ja teki toimilaitteen käyttökelvottomaksi", selittää Stephan-Daniel Gravert.
Tämä ongelma on ratkaistu HALVE-toimilaitteissa, koska yksi reikä sulkeutuu olennaisesti itsestään suojaavan ulkomuovikerroksen ansiosta.
Tämän seurauksena kotelo pysyy täysin toimivana sähkövian jälkeenkin.
Kaksi tutkijaa ovat selvästi iloisia saadessaan tehdä ratkaisevan läpimurron tekolihasten kehityksessä, mutta ne ovat myös realistisia.
Kuten Robert Katzschmann sanoo, ”Nyt meidän on valmisteltava tämä tekniikka laajamittaista tuotantoa varten, emmekä voi tehdä sitä täällä ETH-laboratoriossa. Tekemättä liikaa paljastuksia voin sanoa, että olemme jo osoittaneet kiinnostusta yrityksiltä, jotka haluavat tehdä yhteistyötä kanssamme."
Esimerkiksi keinotekoisia lihaksia voitaisiin jonain päivänä käyttää uusissa roboteissa, proteeseissa tai puettavissa laitteissa.
Toisin sanoen ihmiskehossa ja sen päällä käytettävissä teknologioissa…
Silikonista valmistettu vadelma ohjaa robotteja sadonkorjuuseen
Oikea kunnianosoitus Luganosta nuorelle Smilebotsin robottitiimille



Puolitoimilaitteilla ohjattu vapaa tarrain, joka tarttuu PLA-lohkoon
Kiinnittämätön keinotekoinen kala, jota ohjataan HALVE-toimilaitteilla, vesijohtovedessä
Saatat myös olla kiinnostunut:

Taam Ja' on maailman syvin "sininen aukko": löytö
Yucatanin niemimaalla tutkittu meriontelo, joka löydettiin neljä kertaa syvemmälle kuin edellinen ennätysvapaa Belizestä

Brasiliassa maailman ensimmäinen kohtaus bioturvallisuuden ja synkrotronien välillä
Campinasissa NB4-tason maksimibiologinen suojalaboratorio liitetään hiukkaskiihdyttimen valonlähteisiin

Alto Adigessa tänään EDIH NOI on tekoälyn uusi vertailukohta
Bolzanossa PNRR-rahastosta osoitetaan 4,6 miljoonaa euroa älykkyyden digitalisoinnin alan palveluihin paikallisille yrityksille…
Toimitushenkilöstö Innovando.NewsInnovando.Newsin toimituskunta
Itävalta, Saksa ja Sveitsi "innovatiivisempien" rahtirautateiden osalta
DACH-ministerit Leonore Gewessler, Volker Wissing ja Albert Rösti: digitaalisen automaattisen pariliitoksen käyttöönotto on avaintekijä
Toimitushenkilöstö Innovando.NewsInnovando.Newsin toimituskunta

 //
//